![CAE 아토즈 [CAE AtoZ]](https://tistory1.daumcdn.net/tistory/4851315/skinSetting/c853faceba4f4ee7bb954261b8401f1d)
PLMCONT000은 Contact 모델은 각각 평면 형상으로 으로 정의된 두 바디 사이의 탄성 접촉을 정의 합니다.

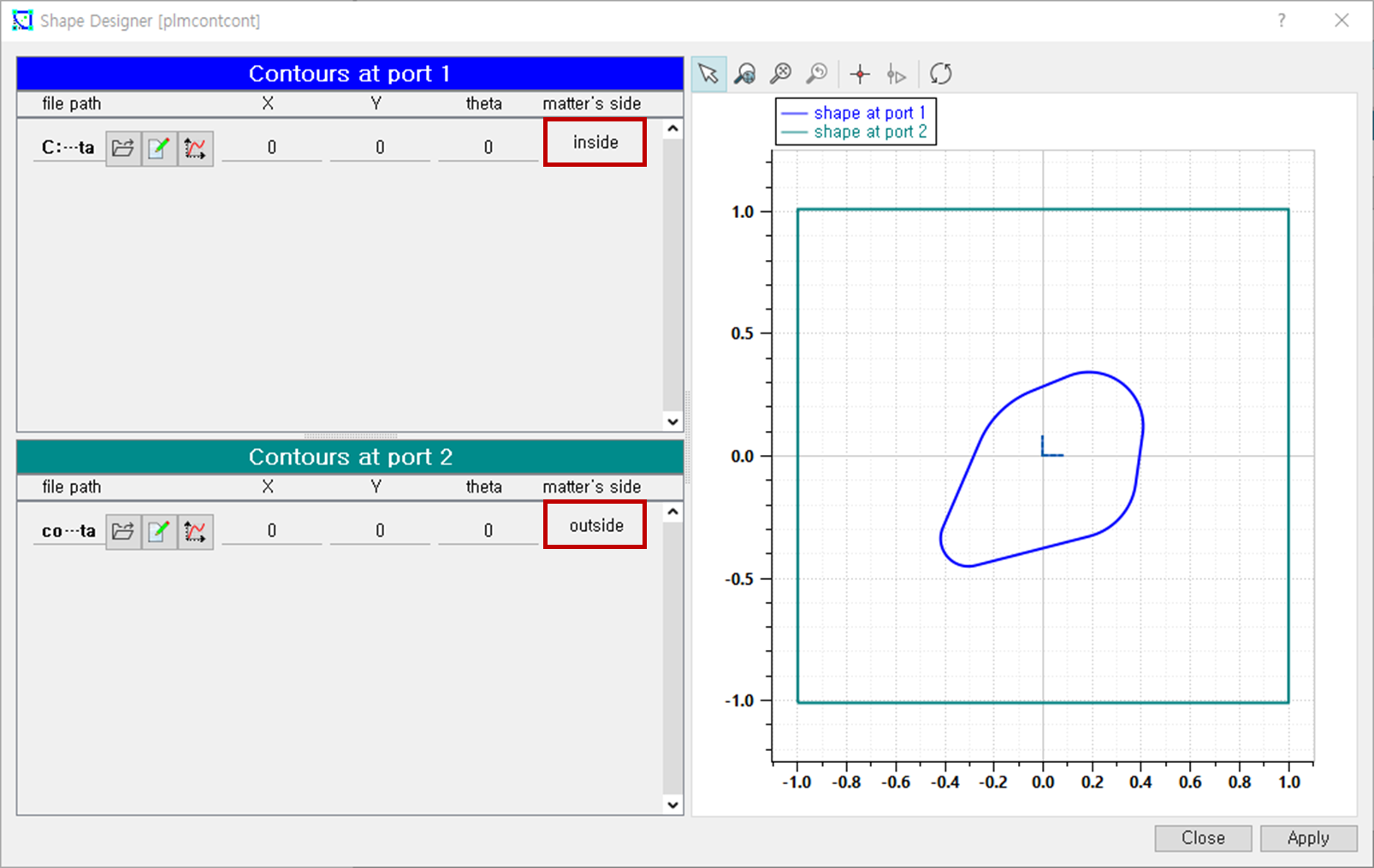
접촉 형상은 1개이상의 Contour 파일로 설정되며 Parameter 모드와 Simulation 모드에서 특정 앱(Planar shape designer)을 통해 형상을 정의 할 수 있습니다.
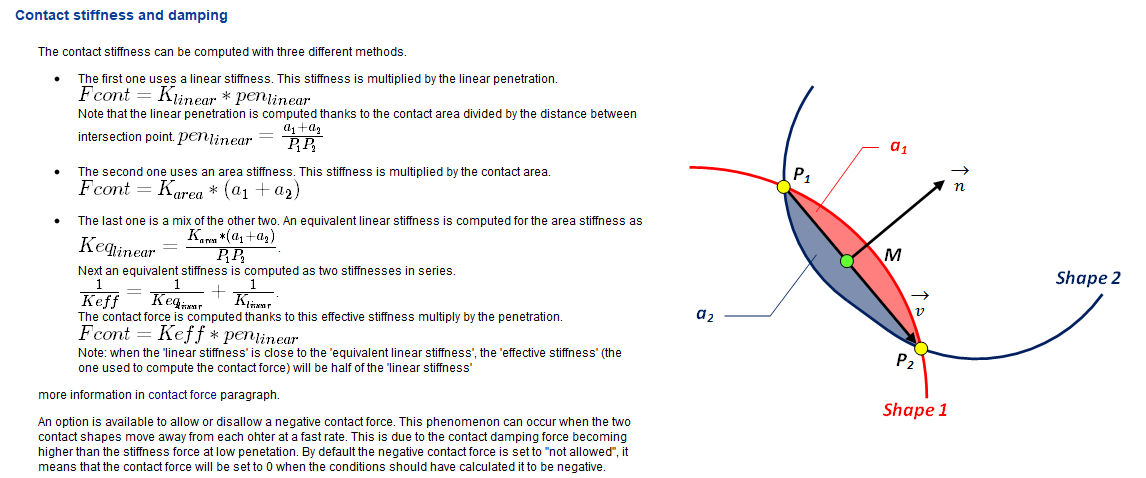
라이브러리의 문서상 두 바디사이의 접촉력은 다음과 같이 두 형상간의 오버랩 (Penetration) 거리와, 오버랩 속도에 따라 접촉 강성(Contact Stiffness)과 점촉 감쇄 계수(Contact Damping)에 대한 다항식으로 정의 됩니다.
이 때 두 형상간의 오버랩 거리를 잘못 계측 (Detection) 하거나 두개의 형상이 겹쳐있게 되면 순간적으로 매우 큰 Contact Force가 발생하게 되어 시뮬레이션이 느려지거나 다음 메시지와 같이 step size 에러가 발생하며 수렴에 실패 하게 됩니다.

이 문제는 일반적으로 PLMCONT000 모델을 정의 할때 두개의 접촉 형상이 잘못 정의되어 발생합니다.
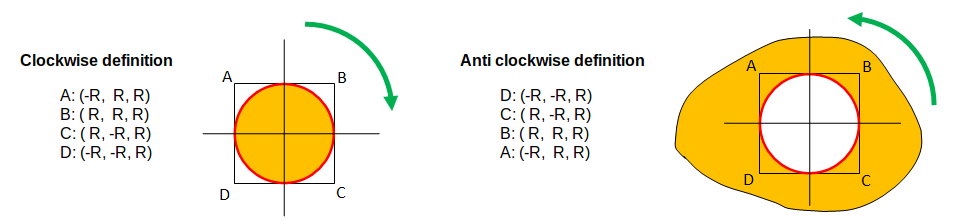
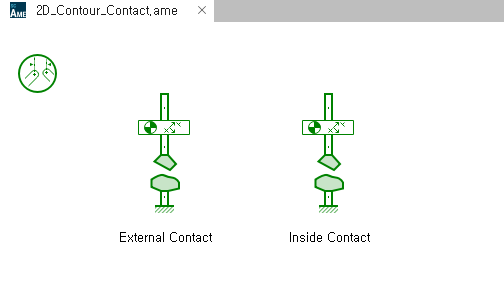
아래의 좌측의 그림과 같이 접촉형상을 정의 하기위한 4개의 포인트를 시계 방향으로 정의 할 때와 우측과 같이 반시계 방향 순서로 정의 할 때 내부적으로 오버랩(Penetration)을 계측 하는 방향이 달라 집니다.


시계 방향으로 형상을 정의 할때 솔버는 접촉 형상이 컨투어 내부에 있다라고 정의 하며 반대는 컨투어 외부를 접촉 형상으로 정의하게 됩니다.
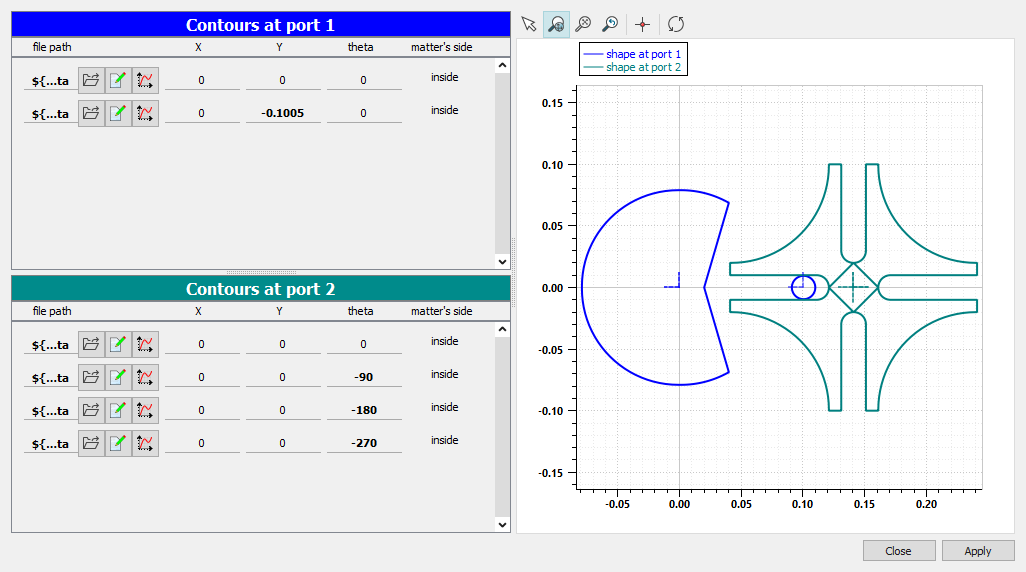
예를들어 좌측 그림과 같이 1번 포트와 2번 포트의 접촉 형상의 방향이 내부 (Matterial Side : Inside)로 동일 할 때 두개의 형상은 서로 떨어진 초기 위치를 가져야 합니다.
비교 모델로 2번 포트의 접촉 형상이 외부 (Matterial Side : Outside)로 정의 될 때 1번 포트에서 정의한 형상은 2번 포트의 형상 내부에 위치 해야 정상적인 Contact Force를 계산 합니다.
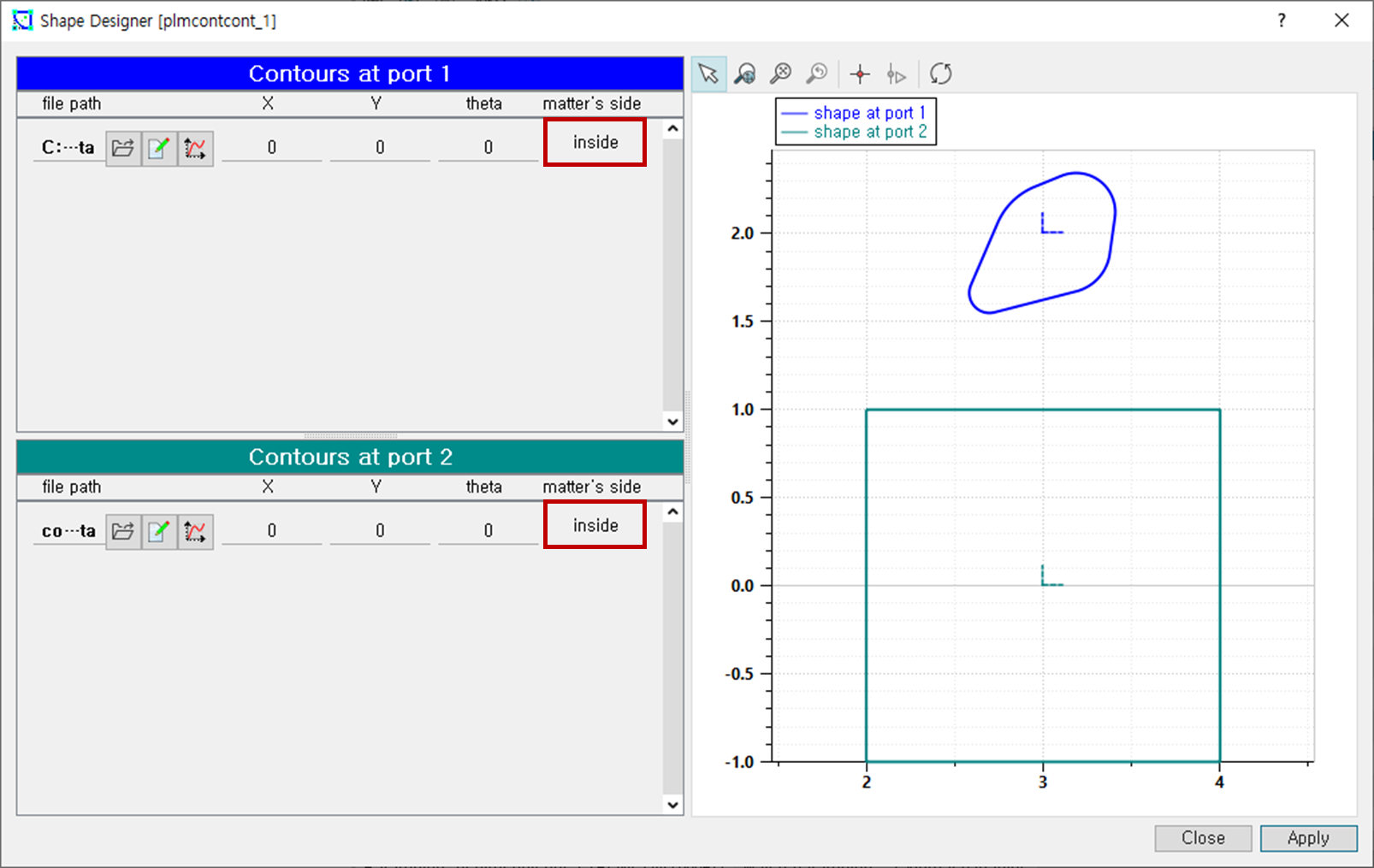
이렇게 접촉이 되는 두 지오메트리간의 Material Side에 맞춰 Dynamic Body의 위치가 설정이 되어야 정상적인 시뮬레이션 결과를 얻을 수 있습니다 .
'Simcenter 기술 자료 > Simcenter Amesim' 카테고리의 다른 글
| [3D Mechanical] Rope Simple demo #2 (0) | 2023.04.24 |
|---|---|
| [3D Mechanical] Rope Component Icon 소개 (0) | 2023.04.20 |
| [3D Mechanical] Pivot Junction의 Orientation 설정 방법과 회전 모션 구현 (0) | 2023.04.14 |
| [Simcenter Amesim] Simulation 결과를 저장(Export) 방법 #3 (0) | 2022.03.02 |
| [Simcenter Amesim] Simulation 결과를 저장(Export) 방법 #2 (0) | 2022.02.28 |




댓글