![CAE 아토즈 [CAE AtoZ]](https://tistory1.daumcdn.net/tistory/4851315/skinSetting/c853faceba4f4ee7bb954261b8401f1d)
이번 블로그에서는 Simcenter Amesim 에서 제공되는 라이브러리중 하나인 3D Mechanical 라이브러리의 조인트 설정 방법에 대해서 알아보겠습니다.

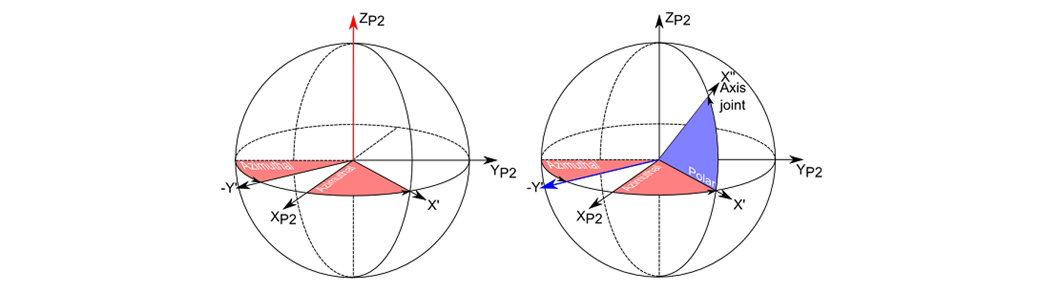
라이브러리 문서 상에서 Pivot Junction의 자세(Orientation)는 Azimuthal Angle과 Ploar Angle로 정의 된다라고 합니다.
Azimuthal Angle과 Ploar Angle은 3차원 공간상에 한 점(P)을 정의 하는 방법중 하나인 구면 좌표계와 비슷한 개념이라고 이해 하시면 좋을듯 합니다. (구면 좌표계에 대한 자세한 내용은 아래 링크를 참고하세요)
구면좌표계 - 위키백과, 우리 모두의 백과사전
위키백과, 우리 모두의 백과사전. 구면좌표계(球面座標係, spherical coordinate system)는 3차원 공간 상의 점들을 나타내는 좌표계의 하나로, 보통 ( r , ϕ , θ ) {\displaystyle (r,\phi ,\theta )} 로 나타낸다.
ko.wikipedia.org
여기서 조인트의 자세를 정의하기 위해서 방향만 정의 하면 되기 때문에 구면 좌표계 상의 OP의 거리 (r) 은 정의를 하지 않아도 됩니다.
위 내용을 바탕으로 Pivot Junction의 Orientation이 Amesim에서 어떻게 적용되었는지 아래의 예를 통해 살펴 보겠습니다.
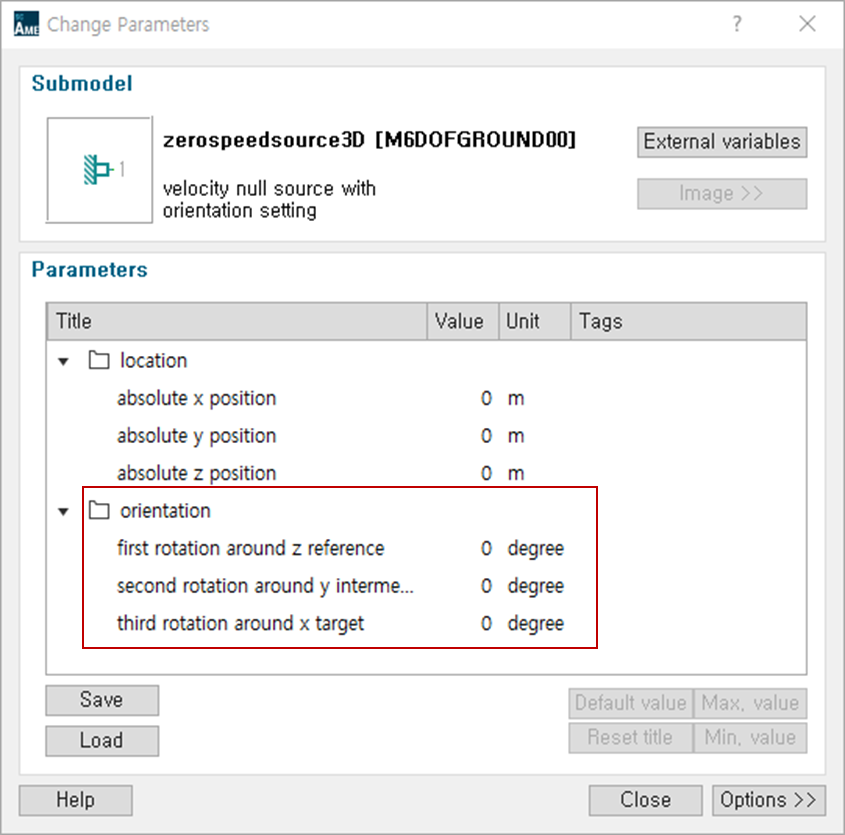
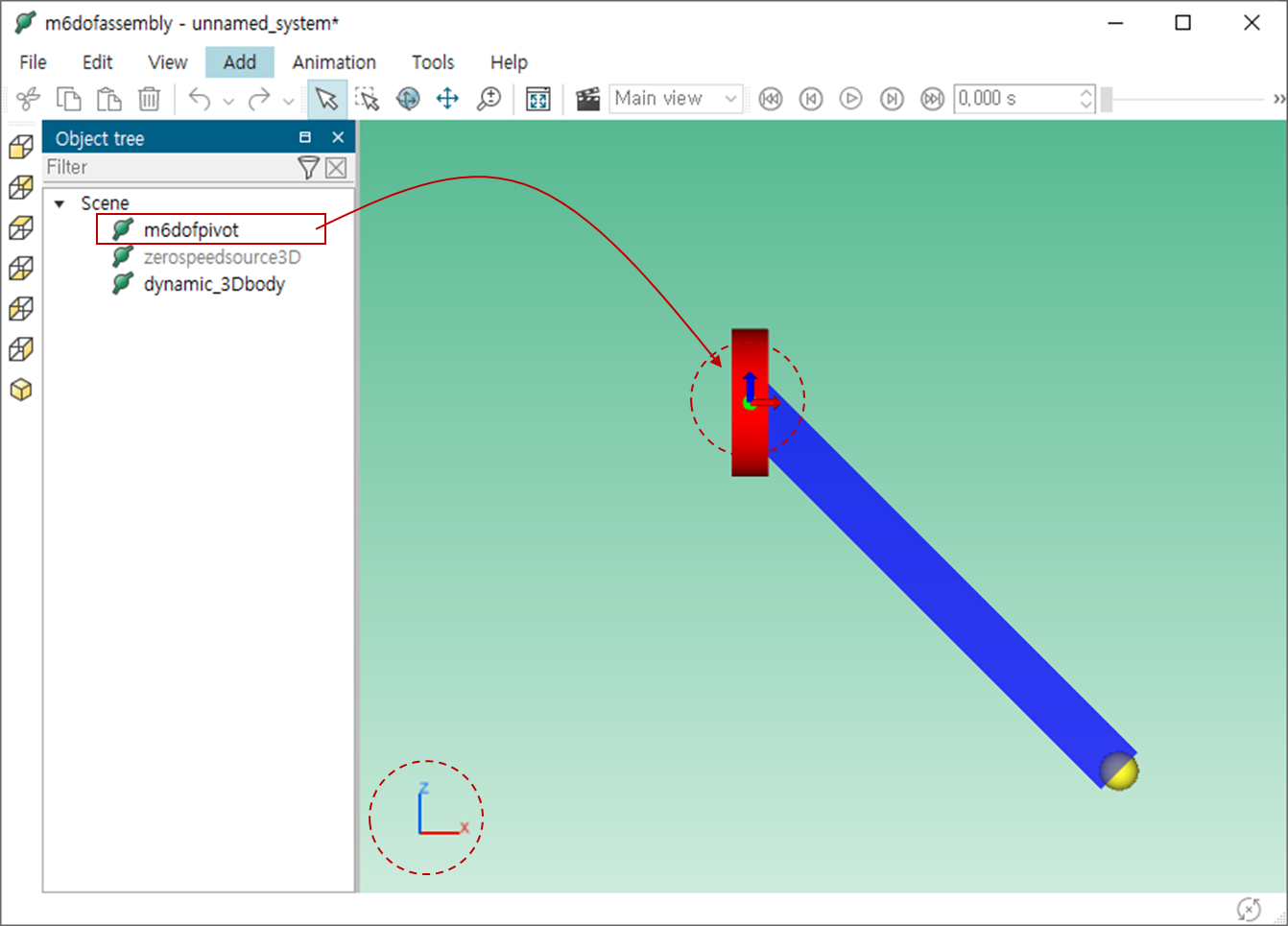
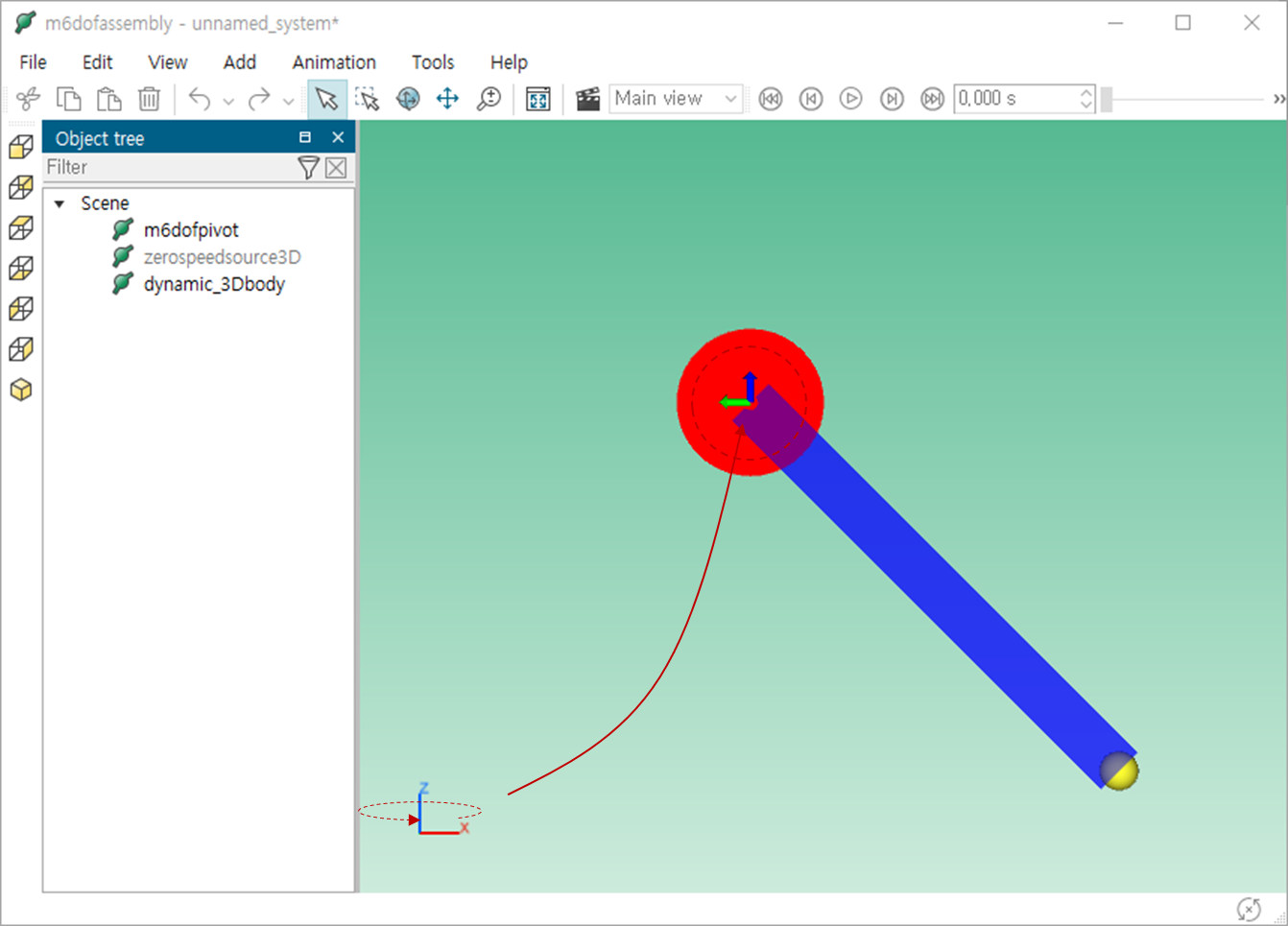
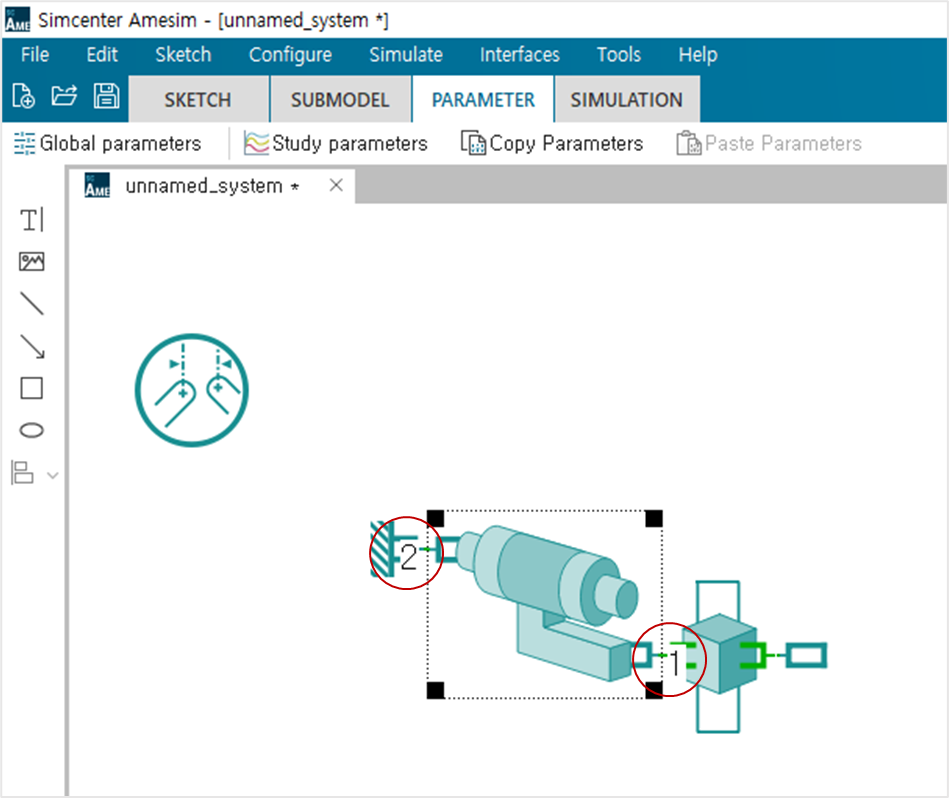
Pivot Junction의 Orientation을 확인 하기 위해 아래와 같이 테스트 모델을 정의 하도록 하겠습니다.
1차 테스트 모델
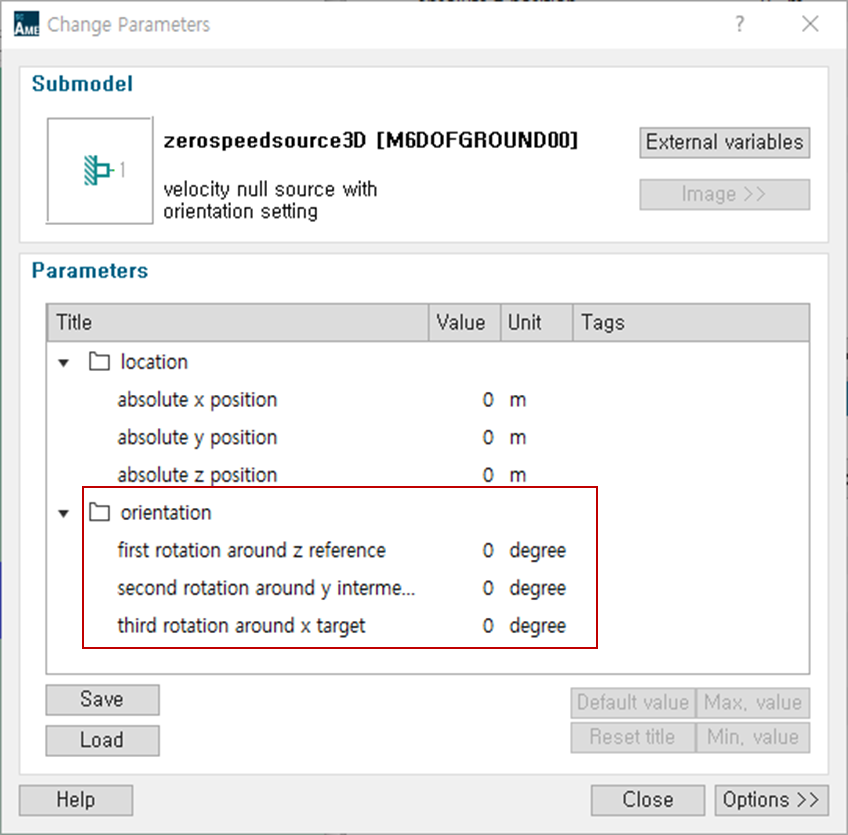
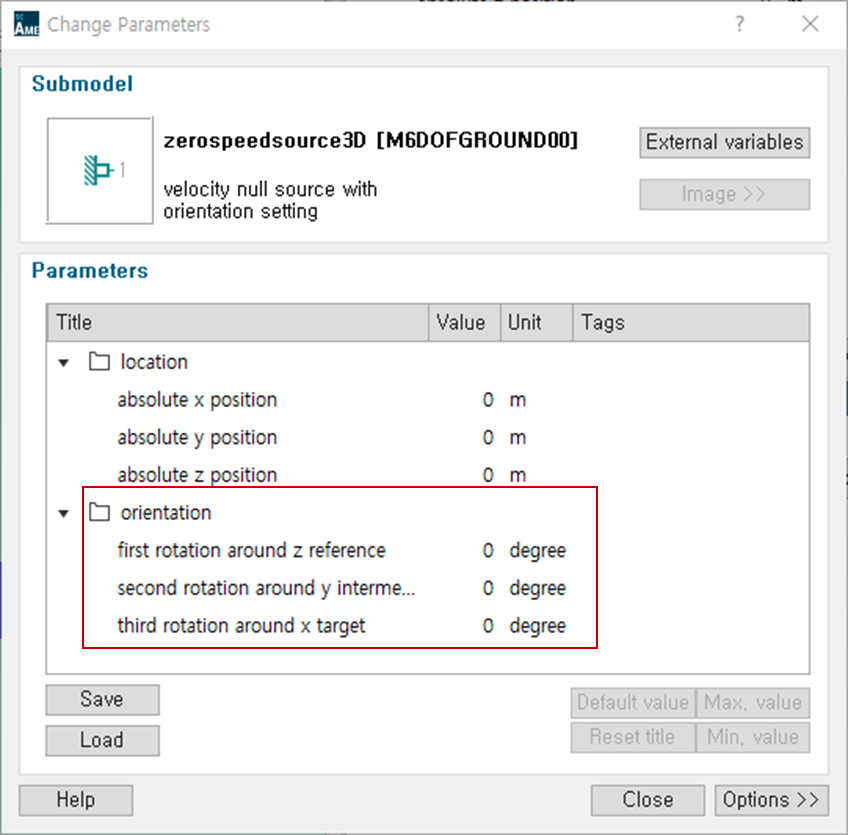
Pivot Junction의 입력 파라미터중 각각의 의미는 아래와 같습니다.
azimuthal angle at port 2 : port 2 (Zerospped) 의 기준 프레임를 기준으로 z축으로 1차 회전한 각도
polar angle at port 2 : z축으로 1차 회전한 프레임(x', y', z')의 -y' 축을 기준으로 회전한 각도
Pivot Junction의 port 2 (Zerospped) 기준 프레임이 [0d,0d,0d] 로 절대 좌표 프레임과 동일하고, 회전 변환을 하지 않았으므로 Pivot Junction의 Orientation는 절대 프레임과 동일하게 나타납니다.
비교를 위해 다음과 같이 2차 테스트 모델을 만듭니다.
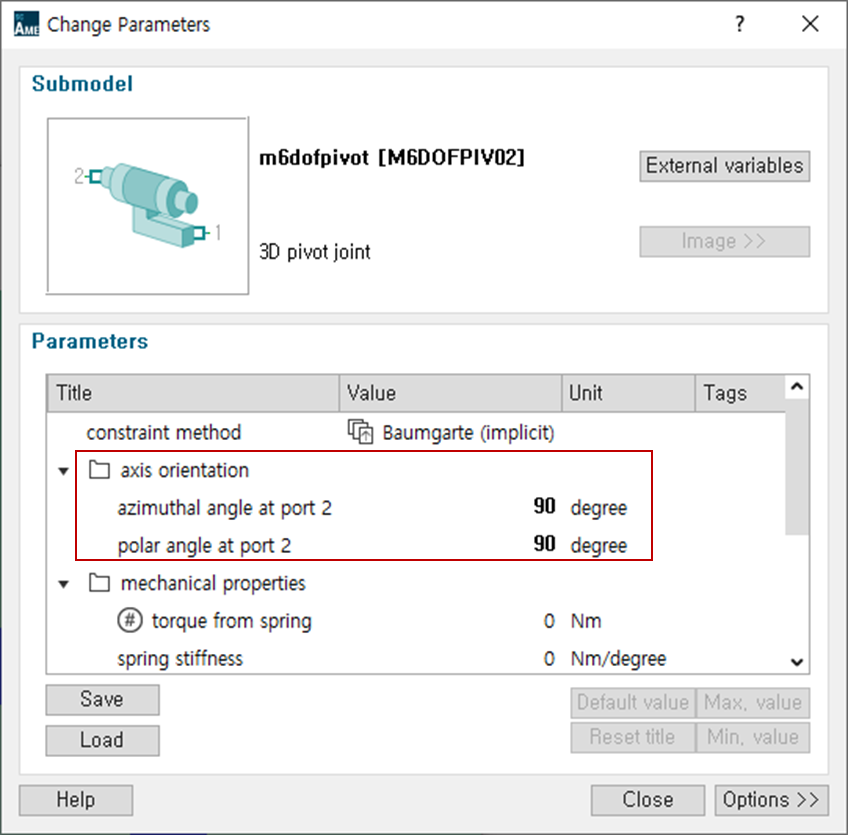
Pivot Junction의 azimuthal angle을 [90] degree로 변경 합니다.
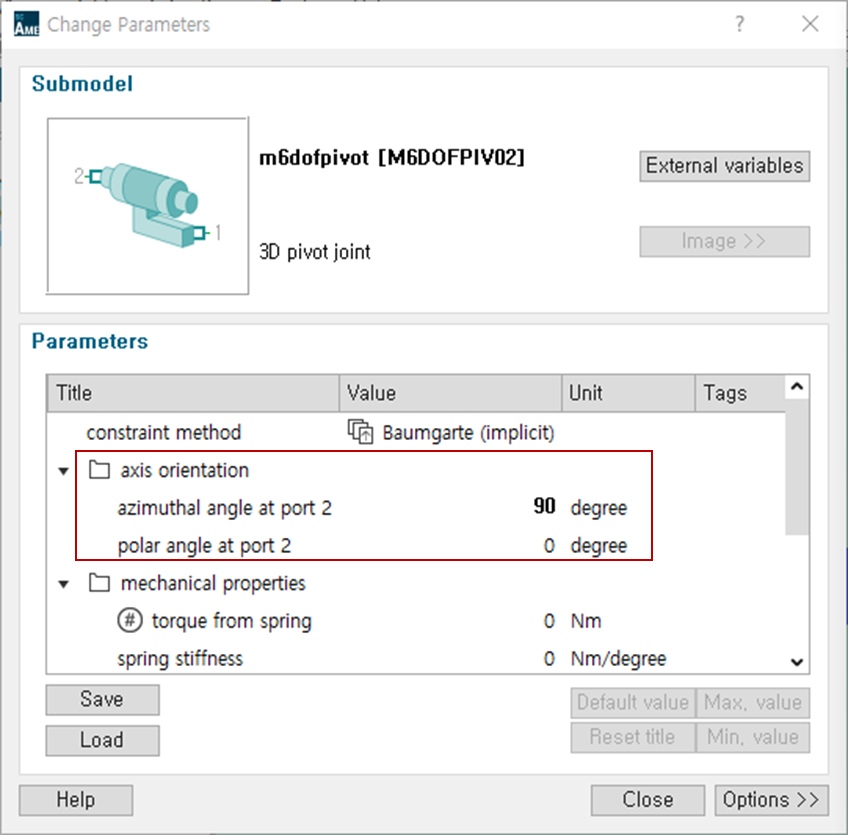
비교 모델은 Pivot Junction의 port 2 (Zerospped) 기준 프레임 [0d,0d,0d] (절대 좌표 프레임)의 초기 자세에서 Z방향(Azimuthal angle) 으로 [90d]로 1차 회전한 결과로 아래와 같이 나타 납니다.
비교를 위해 다음과 같이 3차 테스트 모델을 만듭니다.
Pivot Junction의 azimuthal angle을 [90] degree , Ploar angle을 [90] degree로 변경 합니다.
마지막 비교 모델은 Pivot Junction의 port 2 (Zerospped) 기준 프레임 [0d,0d,0d] (절대 좌표 프레임)의 초기 자세에서
Z방향(Azimuthal angle) 으로 [90d]로 1차 회전 후
1차 회전한 프레임을 기준으로 -Y방향 (Polar angle) 으로 [90d] 2차 회전한 결과로 아래와 같이 나타남
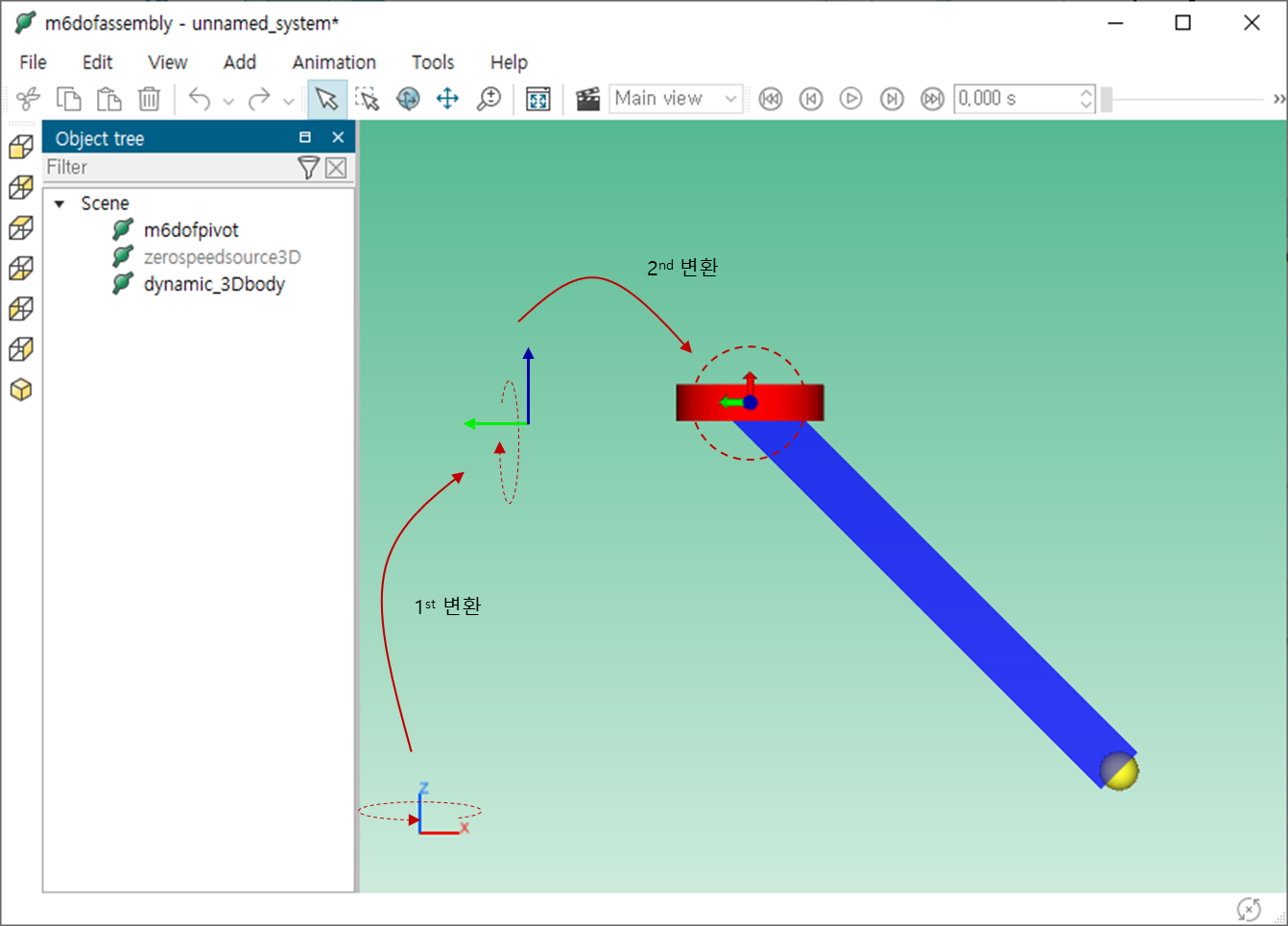
본질적으로 Euler 좌표계의 [Z, Y, X] 각각의 회전 시퀀스에 아래의 값이 입력 되는것 과 동일 합니다.
Z = Azimuthal angle
Y = - Polar angle
X = 0
중력을 -Z 방향으로 설정 후 각각의 비교 모델의 해석 결과 Pivot Junction은 x 방향 로컬 프레임을 기준축으로 회전 운동 함을 알수 있습니다.

데모 모델 다운로드
'Simcenter 기술 자료 > Simcenter Amesim' 카테고리의 다른 글
| [3D Mechanical] Rope Component Icon 소개 (0) | 2023.04.20 |
|---|---|
| [2D Mechanical] PLMCONT000 접촉 모델의 수렴 문제 원인과 해결 방법 (0) | 2023.04.20 |
| [Simcenter Amesim] Simulation 결과를 저장(Export) 방법 #3 (0) | 2022.03.02 |
| [Simcenter Amesim] Simulation 결과를 저장(Export) 방법 #2 (0) | 2022.02.28 |
| [Simcenter Amesim] Simulation 결과를 저장(Export) 방법 #1 (0) | 2022.02.25 |




댓글